掌舵者")
產(chǎn)品導(dǎo)航
- 競賽設(shè)備系列
- 機(jī)器視覺實訓(xùn)系列
- 實訓(xùn)系列
- 人工智能實驗系列
- 傳感器實訓(xùn)系列
- 單片機(jī)實訓(xùn)系列
- 電工電子技術(shù)系列
- 電機(jī)電氣技術(shù)系列
- 電力電子技術(shù)系列
- 電梯維修實訓(xùn)系列
- 工廠供配電實驗實訓(xùn)裝置
- 工程制圖實訓(xùn)系列
- 工業(yè)機(jī)器人與運動控制實訓(xùn)系列
- 過程控制實訓(xùn)系列
- 機(jī)電一體化實訓(xùn)系列
- 機(jī)械基礎(chǔ)實訓(xùn)系列
- 家電維修實訓(xùn)系列
- 可編程控制器實訓(xùn)系列
- 鉗工技能實訓(xùn)系列
- 柔性自動化先進(jìn)制造實訓(xùn)系列
- 維修電工實訓(xùn)系列
- 物聯(lián)網(wǎng)系列
- 新能源系列
- 液壓與氣壓傳動系列
- 制冷制熱系列
- 智能樓宇系列
- 人工智能實驗系列
- 實驗系列
- 科普系列
- 普教系列
- 虛擬仿真軟件
- 分析儀器系列
- 教育信息化系列
方案")
實驗箱")
聯(lián)系我們
聯(lián)系人:陳經(jīng)理
手 機(jī):13708870934
電 話:0871-64637773
郵 箱:nuonikj@sina.com
網(wǎng) 址:xg303.com
地 址:昆明市西山區(qū)日新路潤城一期13棟2302室

首頁 > 產(chǎn)品中心
> 競賽設(shè)備系列
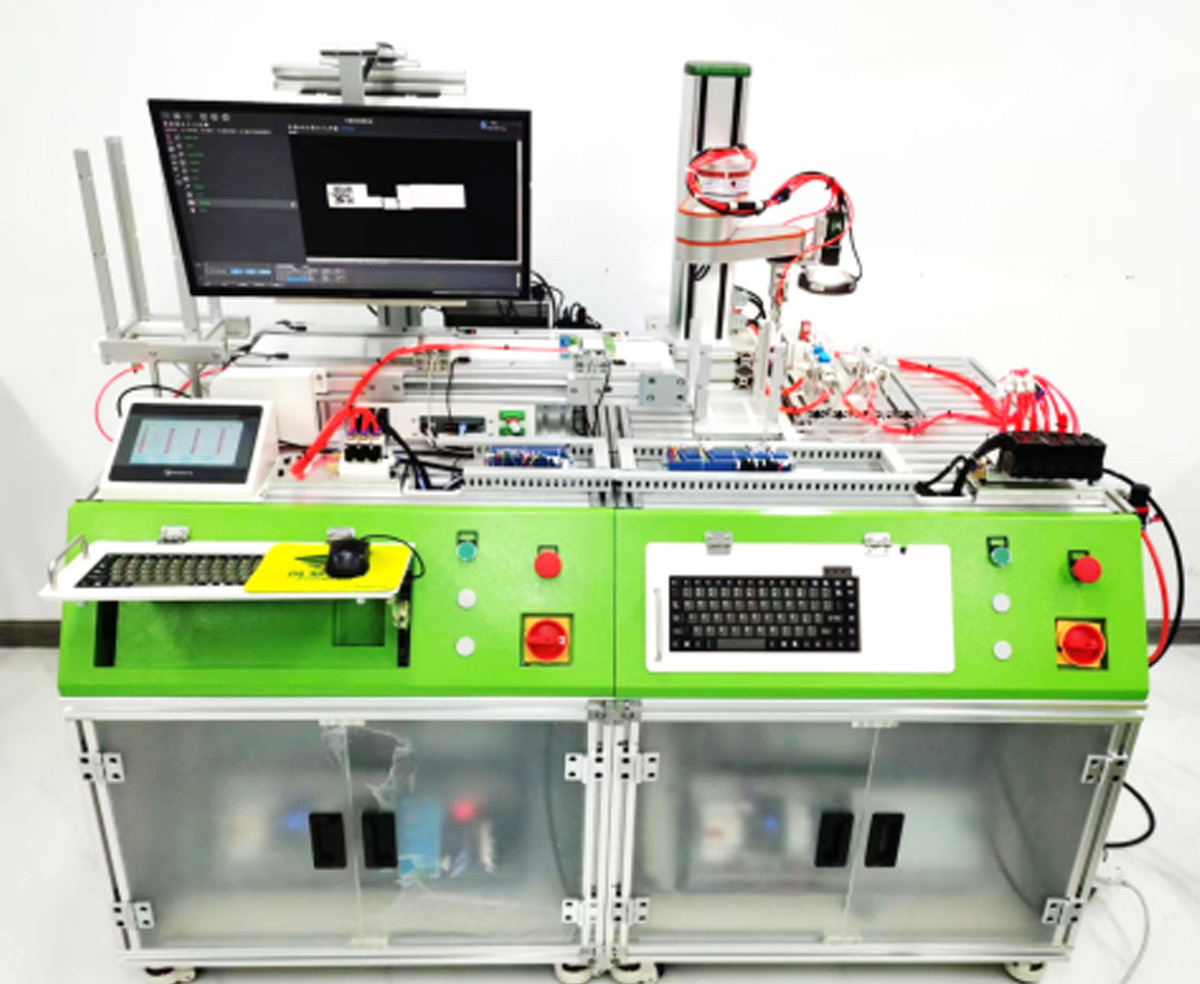
2022年世界機(jī)器人大賽(中職組)"工業(yè)機(jī)器視覺編程與應(yīng)用"賽項比賽平臺
本平臺采用了分站組合式設(shè)計,由上料模組、傳送模組、視覺檢測單元、執(zhí)行單元等模塊組成,能夠開展機(jī)器視覺、工業(yè)機(jī)器人、運動控制、PLC控制等相關(guān)實訓(xùn)或考核,讓學(xué)生在實訓(xùn)中學(xué)習(xí)工業(yè)視覺系統(tǒng)的開發(fā)技術(shù)以及實現(xiàn)方式,激發(fā)其創(chuàng)新潛力。
一、賽項簡介
世界機(jī)器人大賽(World Robot Contest)自2015年起已成功舉辦了7屆,共吸引了全球20余個我國近20萬名選手參賽,已連續(xù)入圍了教育部辦公廳公布的“2020—2021學(xué)年”和“2021—2022學(xué)年”面向中小學(xué)生的全國性競賽活動名單。--教育部白名單賽事!
世界機(jī)器人大賽由選拔賽(WRCT)、總決賽(WRCF)、錦標(biāo)賽(WRCC)組成,圍繞科研類、技能類、科普類三大競賽方向,設(shè)共融機(jī)器人挑戰(zhàn)賽、腦控機(jī)器人大賽、機(jī)器人應(yīng)用大賽、青少年機(jī)器人設(shè)計大賽共四大賽事。
本賽項基于機(jī)器視覺在工業(yè)、生活、商業(yè)等多個領(lǐng)域的應(yīng)用,實現(xiàn)基于工業(yè)機(jī)器視覺的定位、測量、識別、檢測、手眼標(biāo)定與運動控制等多種技術(shù)融合的場景。賽項以新型制造及智能化裝備發(fā)展趨勢為目標(biāo),結(jié)合工業(yè)機(jī)器人的智能化、柔性化應(yīng)用,更好的服務(wù)于產(chǎn)業(yè)升級發(fā)展。
通過賽項項目,能進(jìn)一步深化產(chǎn)學(xué)融合,提高參賽學(xué)生對現(xiàn)有工業(yè)視覺技術(shù)產(chǎn)品的集成應(yīng)用能力,推進(jìn)高職院校工業(yè)機(jī)器人技術(shù)相關(guān)專業(yè)在培養(yǎng)目標(biāo)、課程體系、教學(xué)條件、考核評價、師資隊伍建設(shè)上的改革。
二、工業(yè)機(jī)器視覺編程及應(yīng)用實訓(xùn)裝置簡介
本平臺采用了分站組合式設(shè)計,由上料模組、傳送模組、視覺檢測單元、執(zhí)行單元等模塊組成,能夠開展機(jī)器視覺、工業(yè)機(jī)器人、運動控制、PLC控制等相關(guān)實訓(xùn)或考核,讓學(xué)生在實訓(xùn)中學(xué)習(xí)工業(yè)視覺系統(tǒng)的開發(fā)技術(shù)以及實現(xiàn)方式,激發(fā)其創(chuàng)新潛力。
機(jī)器視覺編程及應(yīng)用實訓(xùn)裝置-高職組")
標(biāo)準(zhǔn)底座,功能模塊安裝平臺,型材桌面,模塊安裝調(diào)整便捷;
帶輪腳杯,移動方便,放置穩(wěn)固;
配備獨立電源及氣源處理裝置,以及控制開關(guān)、鍵盤鼠標(biāo)等外設(shè), 為功能模組提供支持
2.2 皮帶模組:
分為上料位、檢測位、下料位,由步進(jìn)電機(jī)(帶編碼器)、對射光纖、止動氣缸等組成。
2.3 視覺單元:自動上料,在線視覺檢測(2D、3D兼容),高精度定位;
配備獨立控制及圖像處理系統(tǒng),可單機(jī)運行,可選配多通道分揀剔除模塊,也可多機(jī)串聯(lián)(IO或協(xié)議通訊);
模塊化流道,步進(jìn)電機(jī)控制,帶編碼器位置反饋白色皮帶內(nèi)有背光照明,可帶多組觸發(fā)傳感器和制動氣缸;
圖像采集模塊多維度可調(diào),兼容性安裝設(shè)計,可適應(yīng)多型號相機(jī)及光源;
運動狀態(tài)及識別圖像可視化,結(jié)果更加一目了然;
自帶豐富外設(shè),開發(fā)、測試更方便。
2.4 KVision Box機(jī)器視覺應(yīng)用模塊:
可以同時支持兩路USB3.0 相機(jī)和四路PoE GigE相機(jī)同時采集;
自帶光耦隔離GPIO(8IN、8OUT)、兩路RS232/485接口;
支持TCP/IP、EtherCAT等網(wǎng)絡(luò)協(xié)議,支持運動控制及分布式IO擴(kuò)展;
支持四路光源控制,可以外觸發(fā);
采用可視化拖拽式編程軟件KImage,具備完全自主知識產(chǎn)權(quán);強(qiáng)邏輯,弱編程;
(此內(nèi)容由xg303.com提供)